Kapitel 4.1
Mobile autonome Maschinen
In diesem Abschnitt werden die Sicherheitsaspekte von industriellen mobilen Robotern (IMRs) wie AGVs und AMRs behandelt. Sie erfahren, wie diese Systeme arbeiten, wo Risiken entstehen und welche Schutzmaßnahmen – sowohl integrierte als auch ergänzende – empfohlen werden, um eine sichere Interaktion zwischen Menschen und mobilen Automatisierungssystemen zu gewährleisten.
Flexibler Materialfluss mit AGVs und AMRs
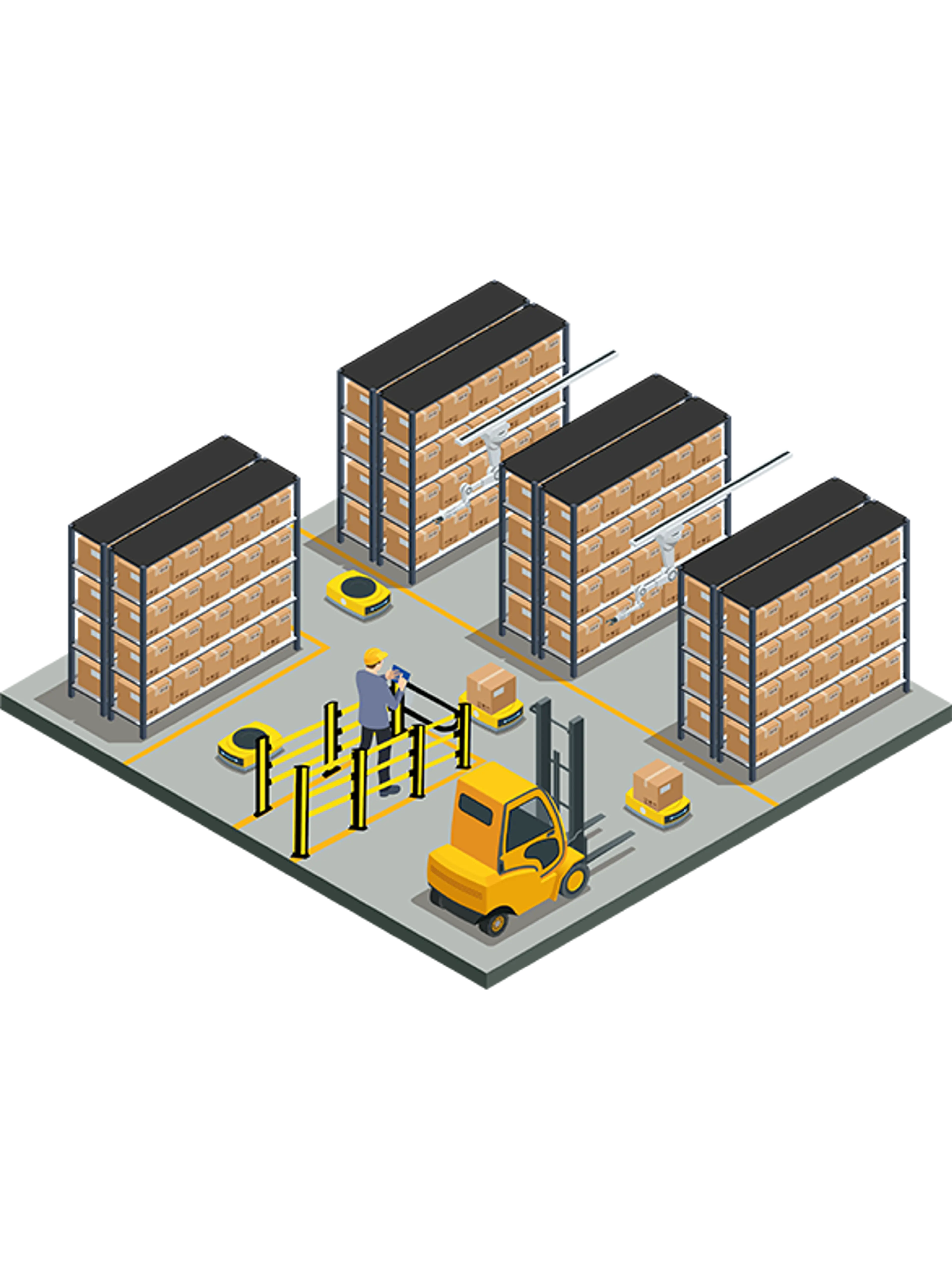
Industrielle mobile Roboter (IMR) wie fahrerlose Transportsysteme (AGV) und autonome mobile Roboter (AMR) können unterschiedliche Lagereinheiten zu und von Lagerplätzen transportieren.
Sie können Paletten, ganze Regale oder sogar sehr große Ladeeinheiten anheben, tragen und bewegen, werden jedoch häufiger für Kisten, Behälter und Totes eingesetzt. Hauptsächlich finden sie Anwendung in „Ware-zur-Person“-Strategien für Karton- und Einzelstückkommissionierung, können jedoch auch für Zwischentransporte im Rahmen einer „Person-zur-Ware“-Strategie genutzt werden.

Typische Lastenhandhabungsmethoden von IMRs
Es gibt fünf Hauptmethoden, mit denen IMRs Lasten aufnehmen und absetzen (Kombinationen dieser Methoden können ebenfalls eingesetzt werden):
- AGVs als fahrerlose Gabelstapler, die Paletten bewegen.
- Ein Roboter, ein Linearsystem oder eine Förderanlage legt die Last auf das Fahrzeug. (Solche Fahrzeuge werden oft als Undercarts bezeichnet; sie können sehr niedrige Bauhöhen von nur 50 bis 300 mm haben.)
- Der IMR verfügt über ein Förderband auf der Oberseite zur Lastübernahme. Manche IMRs können das Förderband teleskopartig in ein Regal ausfahren, um es zu entnehmen; Greifer können das Aufnehmen bzw. Sichern unterstützen.
- Der IMR fährt unter eine Last, hebt sie an und bewegt sie. Ganze Regale können so aufgenommen und zu einem Kommissionierplatz transportiert und anschließend zurück ins Lager gebracht werden. (Solche Systeme werden oft als ASRS = Automated Storage and Retrieval Systems bezeichnet.)
- Ein Roboter auf dem IMR entnimmt Artikel, legt sie in eine Box oder auf eine Plattform, transportiert sie und setzt sie am Zielort ab. Solche IMRs können auch Produktionsaufgaben übernehmen, z. B. Reinigen, Polieren, Prüfen usw.
Typische Risiken in IMR-Umgebungen
Obwohl IMRs mit fortschrittlichen Sicherheitsfunktionen ausgestattet sind, bestehen bestimmte Risiken weiterhin – insbesondere dann, wenn Menschen unaufmerksam werden oder sich zu sehr an ihre Präsenz gewöhnen.
In Notfällen können mobile Roboter auch Fluchtwege blockieren. Die folgende Liste zeigt zentrale Gefahren auf, die bei der Planung und Implementierung von IMR-Systemen unbedingt berücksichtigt werden sollten:
- Kollisionsrisiko – Anfahren oder Überrollen von Personen, insbesondere dort, wo sich IMRs und Fußgänger denselben Raum teilen oder Fahrzeuge manuelle Arbeitsstationen anfahren.
- Unterfahrgefahr – flach gebaute IMRs können unter Maschinen oder Schutzeinrichtungen hindurchfahren, wenn Bodenabstände zu groß sind.
- Quetsch- und Schergefahr durch Umgebung – in engen Bereichen wie Regalen, schmalen Gängen, Türöffnungen, Maschinen oder Gebäudestrukturen.
- Risiken bei der Lastenhandhabung – Quetschen oder Scheren während des Dockings, Ladevorgangs oder der Lastenübergabe.
- Umstürzende Lasten – Gefahr durch instabile oder herabfallende Gegenstände.
- Lokalisierungsfehler – Unfälle durch Ausfälle oder Fehl-Lokalisierung, insbesondere in der Nähe von Treppen, Rampen, Laderampen oder unübersichtlichen Ecken.
- Deaktivierte Sensoren – Präsenzsensoren können während des Dockings oder bei Übergaben außer Funktion sein.
- Unentdeckte Personen – Anwesenheit von Menschen in toten Winkeln außerhalb der Sensorreichweite.
- Risiken durch Zusatzgeräte – Gefahren durch Werkzeuge wie Förderanlagen, Greifer oder Roboterarme, die auf IMRs montiert sind.

Sicherheitsmerkmale und Standards von IMRs
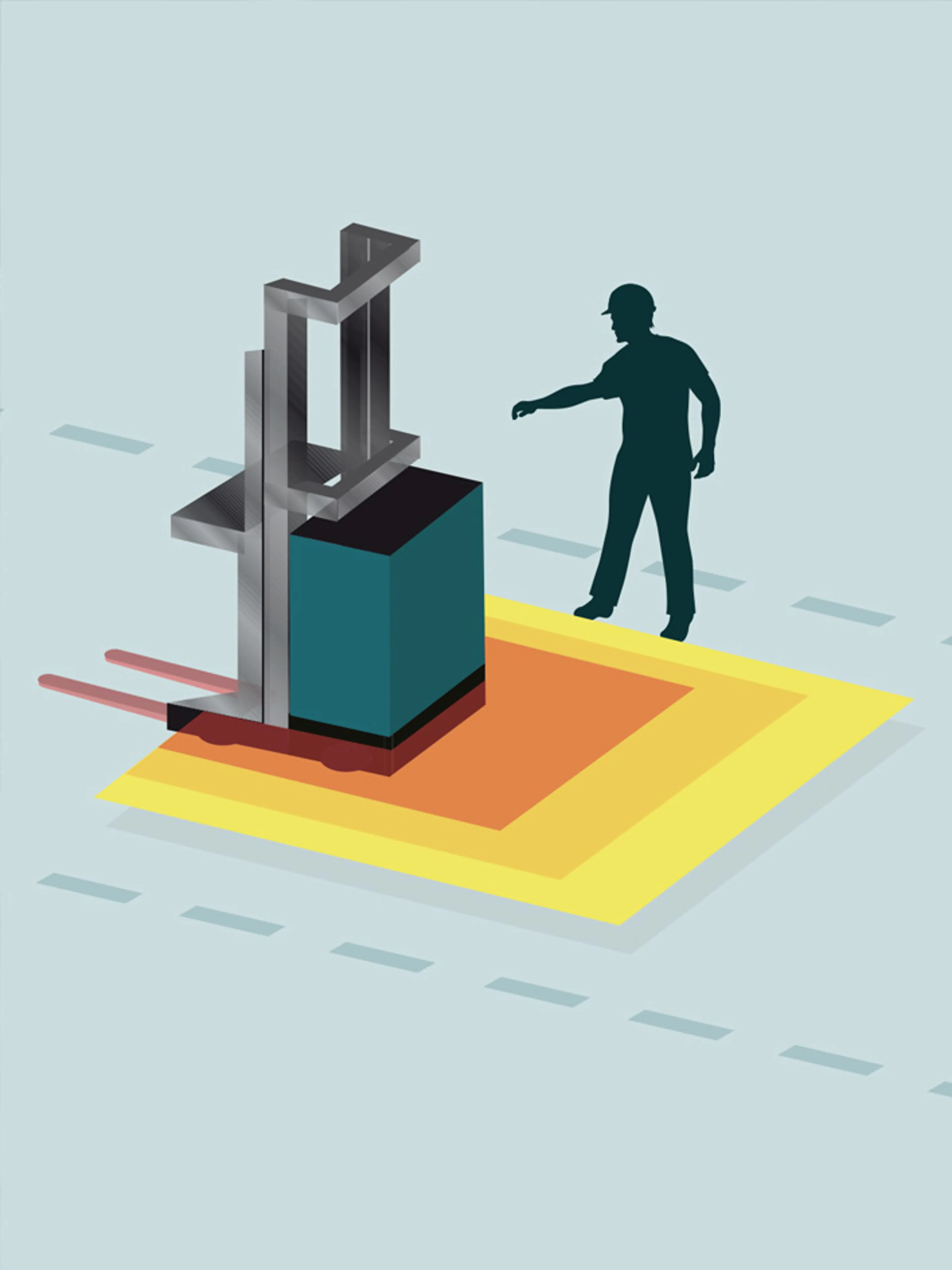
Alle IMRs verfügen über Präsenzsensoren, die Unfälle verhindern sollen.
Die Fahrzeuge bewegen sich in Bereichen, in denen sich Menschen aufhalten, in der Regel langsam und stoppen, wenn sie auf Hindernisse oder Personen im Fahrweg treffen. Die meisten IMRs können so programmiert werden, dass sie virtuelle Sperr- und Ausschlusszonen meiden, und einige sind zusätzlich mit Stoßleisten ausgestattet, die bei einem Aufprall eine Abschaltung auslösen.
Zu den passiven Sicherheitsfunktionen gehören Not-Aus-Taster, Warnleuchten und Alarmsignale. Die Sicherheitsanforderungen für AGVs und IMRs sind in der (EN) ISO 3691-4 sowie in ANSI/RIA R15.08-1 und ANSI/ITSDF B56.5 für die USA festgelegt. Weitere Informationen zu den Normen finden Sie in Kapitel 5.3 Maschinensicherheitsnormen.
Auf dieser Grundlage und gestützt durch umfassende Risikobeurtielung können folgende Maßnahmen erforderlich sein, um eine sichere Arbeitsumgebung zu gewährleisten.